AKADEMIA MARYNARKI WOJENNEJ
im. BOHATERÓW WESTERPLATTE
WYDZIAŁ NAWIGACJI I UZBROJENIA OKRĘTOWEGO
KATEDRA NAWIGACJI I HYDROGRAFII MORSKIEJ
Grupa szkolna 181N
Przedmiot: Infrastruktura nawigacyjna
SPRAWOZDANIE Z WIZYTY STUDYJNEJ
W dniu 02 maja 2022r. w obiektach Urzędu Morskiego w Gdyni:
- Centrum VTS Zatoka Gdańska,
- Służba Ruchu Kapitanatu Portu Gdynia,
- Centrum Monitorowania Systemów Nawigacyjnych zlokalizowane w budynku Radiolatarni Gdynia.
1. Założenia i budowa krajowego systemu bezpieczeństwa morskiego
1.1 Cele projektu
1. Zasadniczym celem budowy Krajowego Systemu Bezpieczeństwa Morskiego, Etap I (KSBM-I) jest poprawa bezpieczeństwa żeglugi morskiej oraz ochrona środowiska w obszarach morskich Rzeczypospolitej Polskiej.
2. Istotą projektu jest utworzenie systemu monitorująco-kontrolnego dla jednolitego zarządzania bezpieczeństwem w obszarach morskich RP przez Administrację Morską oraz dla wymiany informacji bezpieczeństwa żeglugi z współdziałającymi instytucjami krajowymi i międzynarodowymi.
3. Realizacja projektu ma umożliwić m.in.:
• dostosowanie środków i działań Administracji Morskiej do wymagań wynikających z krajowych i międzynarodowych aktów prawnych, wytycznych i zaleceń w zakresie bezpieczeństwa w obszarach morskich,
• stworzenie systemu monitorowania i analizy sytuacji, ostrzegania o zagrożeniach i przekazywania informacji dotyczących bezpieczeństwa morskiego w celu zapobiegania wypadkom morskim i zagrożeniom ekologicznym oraz sprawnego podejmowania działań w przypadku ich zaistnienia, w tym: wspomagania akcji ratowniczych i zwalczania zanieczyszczeń, wspomagania procesu decyzyjnego w przypadku udzielania miejsca schronienia lub reagowania na zagrożenia niestandardowe, wspomagania zarządzania bezpieczeństwem oraz wspomagania dochodzeń powypadkowych i wykrywania sprawców zanieczyszczeń poprzez wykorzystanie systemów śledzenia, identyfikacji oraz archiwizacji danych.
4. Projekt jest realizowany przy współpracy trzech Urzędów Morskich: w Gdyni, Słupsku i Szczecinie oraz Morskiej Służby Poszukiwania i Ratownictwa. Urząd Morski w Gdyni jest Koordynatorem projektu i Zamawiającym oraz wykonuje swoje zadania w oparciu o Porozumienie z dnia 25 lutego 2010 r. pomiędzy Dyrektorami Urzędów Morskich i MSPiR.
5. Projekt realizowany jest systemem „zaprojektuj i zbuduj”. Zamawiający wymaga od Wykonawcy opracowania i przedstawienia do akceptacji projektu zgodnego opisem przedmiotu zamówienia, spełniającego obowiązujące polskie i europejskie normy i przepisy na warunkach określonych w akcie umowy, Ogólnych Warunkach Kontraktu (OWK) bazujących na FIDIC – Warunki Kontraktowe dla Urządzeń oraz Projektowania i Budowy dla Urządzeń Elektrycznych i Mechanicznych oraz Robót Inżynieryjnych i Budowlanych Projektowanych przez Wykonawcę (FIDIC 1999, 4te wydanie 2008) oraz Szczególnych Warunkach Kontraktu (SWK).
1.2 Założenia organizacyjne
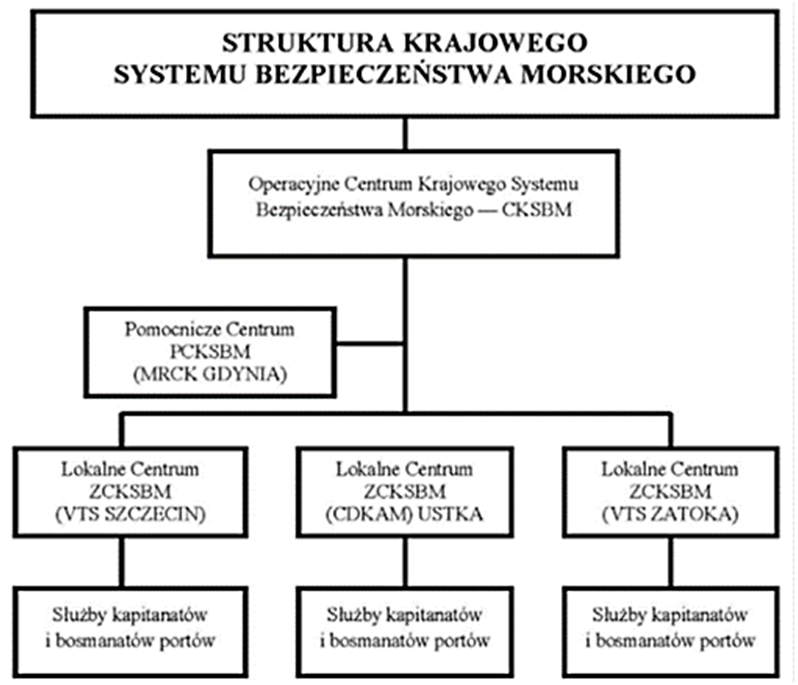
1. Struktura organizacyjna KSBM obejmować będzie centrum KSBM w Gdyni i dwa pomocnicze centra w Ustce i Szczecinie oraz ośrodki służb ruchu administracji morskiej (służby VTS i Kapitanatów Portów).
2. Centrum i pomocnicze centra KSBM mają realizować zadania nadzoru i monitorowania bezpieczeństwa morskiego w obrębie obszarów odpowiedzialności właściwych terytorialnie urzędów morskich z wyłączeniem obszarów nadzoru poszczególnych Kapitanatów Portów (Kapitanaty Portów włączone strukturalnie do właściwych terytorialnie systemów VTS wykonują niezależnie zadania we własnych obszarach odpowiedzialności). Centra KSBM pełnić będą ponadto zadania wymagające całodobowego dyżuru, m.in.: regionalny punkt kontaktowy, punkt stałego dyżuru, zabezpieczenie centrów działań kryzysowych i inne.
3. Centrum KSBM w Gdyni będzie realizować wszystkie funkcje zewnętrzne systemu, m.in. w ramach systemu SafeSeaNet (służba NCA), monitorowania ruchu tankowców jednokadłubowych (SHT), itp. a także realizować będzie wymianę danych z systemami
i służbami zewnętrznymi (krajowymi i międzynarodowymi).
4. W strukturze techniczno-organizacyjnej KSBM wyróżnia się cztery odrębne (samodzielne) komponenty:
• System VTS dla obszaru właściwości terytorialnej Urzędu Morskiego w Gdyni (U MG) obejmujący ośrodki nadzoru ruchu: Centrum VTS Zatoka Gdańska w Gdyni oraz służby ruchu Kapitanatów Portów: Gdynia, Gdańsk, Hel, Władysławowo i Elbląg;
• System VTS dla obszaru właściwości terytorialnej Urzędu Morskiego w Szczecinie (UMS) obejmujący ośrodki nadzoru ruchu: Centra VTMS Szczecin-Świnoujście (Kapitanat Portu Szczecin i PO Świnoujście) oraz służbę ruchu Kapitanatu Portu Dziwnów;
• System VTS dla obszaru właściwości terytorialnej Urzędu Morskiego w Słupsku (UMSł) obejmujący ośrodki nadzoru ruchu: CDKAM w Ustce oraz służby ruchu Kapitanatów Portów: Kołobrzeg, Darłowo, Ustka i Łeba;
• System łączności operacyjnej Służby SAR z centrami zarządzania w MRCK Gdynia i MPCK Świnoujście.
1.3 Założenia funkcjonalne
1. Funkcjonowanie Systemu Nadzoru i Monitorowania Bezpieczeństwa Ruchu Morskiego (SMRM) ma opierać się na wykorzystaniu pełnych (źródłowych) danych z sensorów KSBM przez lokalne ośrodki nadzoru ruchu w celu śledzenia sytuacji nawigacyjnej w czasie rzeczywistym oraz na wykorzystaniu zebranych i przetworzonych informacji na poziomie centralnym w celu wczesnego identyfikowania zdarzeń niebezpiecznych i zagrożeń.
2. Agregacja danych:
• Na poziomie lokalnych służb ruchu (Kapitanatów Portów oraz służb VTS) podstawowym źródłem danych do tworzenia obrazu sytuacji na morzu i oceny sytuacji mają być informacje z zainstalowanych w ramach budowy KSBM-I sensorów (radarów, kamer CCTV, RDF, czujników meteo). Źródłowe dane z sensorów będą przekazywane do tych ośrodków za pomocą sieci lokalnej będącej własnością urzędów morskich (istniejącej i będącej do wykonania w ramach projektu KSBM-I).
• W systemach VTS poszczególnych urzędów morskich dane radarowe z dołączonych sensorów oraz dane AIS mają podlegać wieloźródłowemu przetwarzaniu (multi sensor tracking) zgodnie z wymaganiami określonymi w niniejszej specyfikacji dla aplikacji VTS. Interfejsem użytkownika w centrach VTS mają być stacje robocze VTS wyposażone w aplikacje mapowe (zarządzania ruchem), bazodanowe, systemy zapisu i odtwarzania oraz systemy łączności. Służby ruchu Kapitanatów Portów mają być wyposażone w stacje robocze właściwego systemu VTS. W razie awarii sieci transmisyjnej lub niedostępności centrów VTS Kapitanaty Portów muszą mieć niezależny dostęp do informacji z własnych (lokalnych) sensorów. Obrazy z zainstalowanych kamer mają być dostępne na monitorach w centrach VTS i Kapitanatach. Sterowanie ruchem współużytkowanych kamer ma być zgodne z ustalonym priorytetami. Zapis danych z kamer ma być realizowany lokalnie.
• Przetworzone dane z sensorów i baz danych poszczególnych systemów VTS mają być przesyłane w ujednoliconych standardach przez sieć WAN do centralnej aplikacji systemu. Rolę aplikacji centralnej KSBM będzie pełnić używany obecnie System Wymiany Informacji Bezpieczeństwa Żeglugi (SW IBŻ).
• Docelowo (poza zamówieniem) do aplikacji centralnej zostaną wprowadzone strumienie danych z systemu ZSRN (KOSN – Kompleksowy Obraz Sytuacji Nawodnej) oraz z innych źródeł zewnętrznych.
2.1. Struktura funkcjonalna i techniczna KSBMM
Struktura organizacyjna KSBM obejmuje centrum KSBM w Gdyni i dwa pomocnicze centra w Ustce i Szczecinie oraz ośrodki służb ruchu administracji morskiej (służby VTS i Kapitanatów Portów).
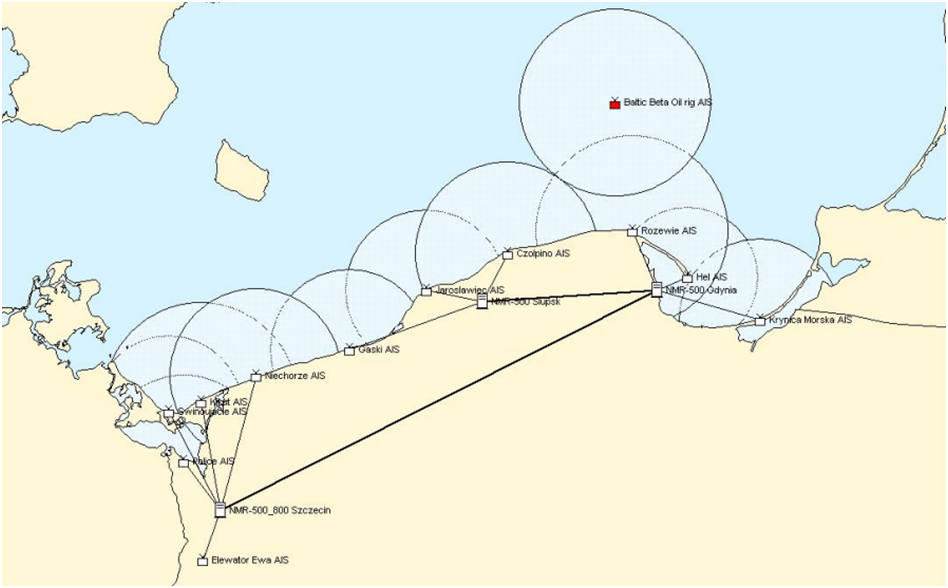
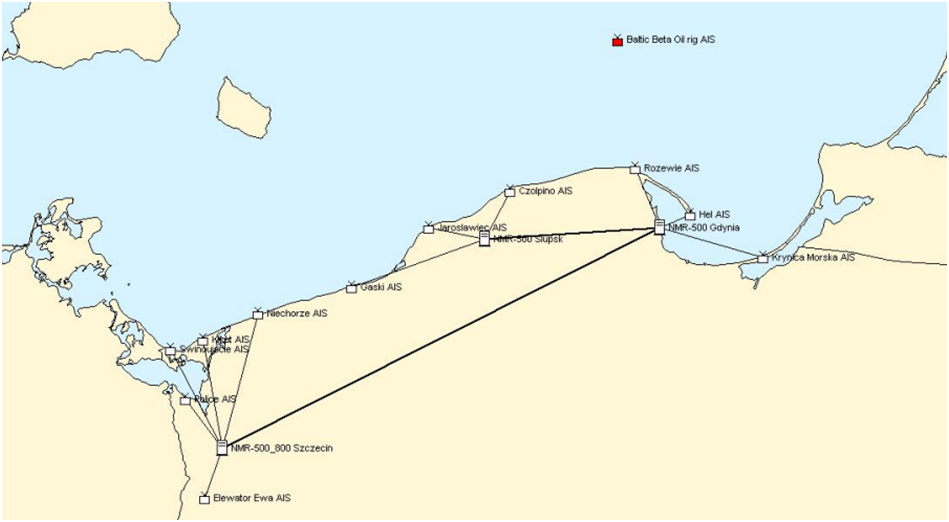
Krajowy system bezpieczeństwa morskiego obejmuje obszary odpowiedzialności dyrektorów trzech urzędów morskich: w Gdyni, Słupsku i Szczecinie, w szczególności podejścia do portów, ich red, kotwicowisk i stref brzegowych, (rysunek 2). Każdy z urzędów morskich, dla potrzeb zarządzania na swoim terytorium, ma lokalne centrum dyspozycyjne, które podporządkowane są Krajowemu Centrum Bezpieczeństwa Morskiegozlokalizowanemu w Gdyni. Centrum krajowe współpracuje z instytucjami krajowymizewnętrznymi w stosunku do systemu KSBM oraz z instytucjami zagranicznymi, w szczególności ze swoimi odpowiednikami w innych państwach UE.
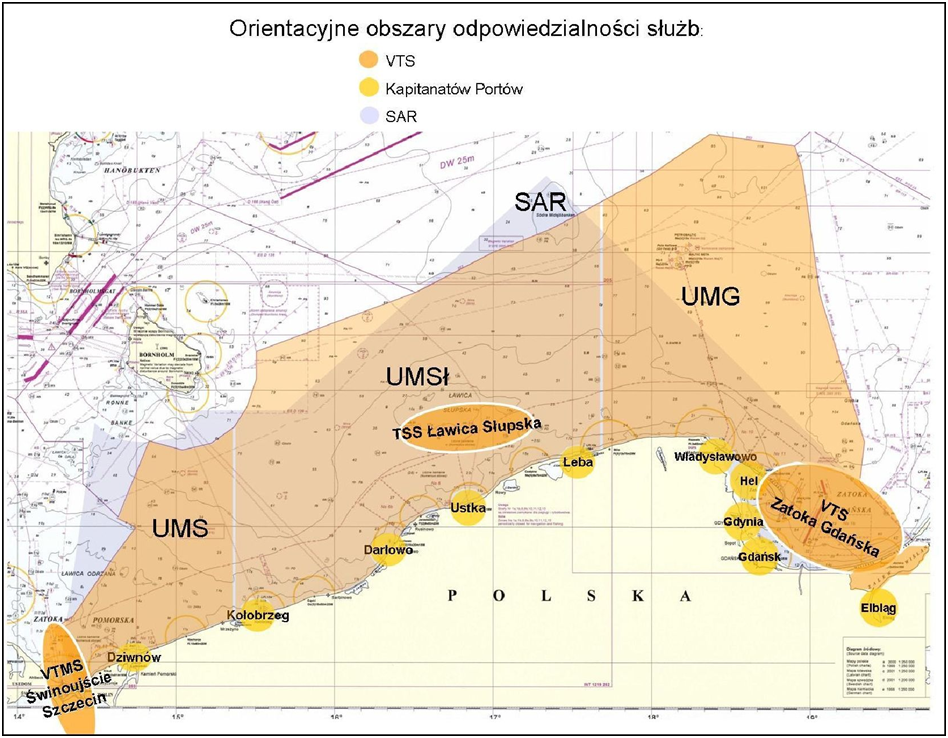
| Rys. 2Obszary odpowiedzialności służb KSBM (Urzędów Morskich w Gdyni (UMG), Słupsku (UMSł) i Szczecinie (UMS), VTS, VTMIS, kapitanatów portów) oraz obszar odpowiedzialności polskiej służby SAR. |
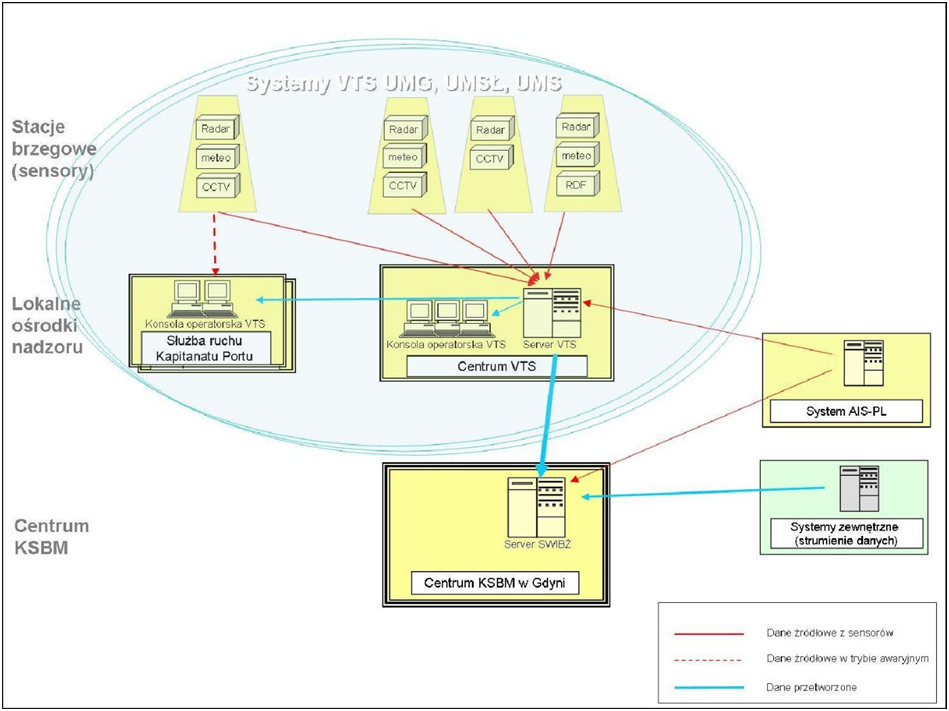
Funkcjonowanie Systemu Nadzoru i Monitorowania Bezpieczeństwa Ruchu Morskiego (SMRM) ma opierać się na wykorzystaniu pełnych (źródłowych) danych z sensorów KSBM przez lokalne ośrodki nadzoru ruchu w celu śledzenia sytuacji nawigacyjnej w czasie rzeczywistym oraz na wykorzystaniu zebranych i przetworzonych informacji na poziomie centralnym w celu wczesnego identyfikowania zdarzeń niebezpiecznych i zagrożeń.
Na poziomie lokalnych służb ruchu (kapitanatów portów i służb VTS) podstawowym źródłem danych do tworzenia obrazu sytuacji na morzu i oceny sytuacji maja być informacje z sensorów (radarów, kamer CCTV, RDF, czujników hydrometeorologicznych) zainstalowanych w ramach pierwszego etapu budowy systemu. Źródłowe dane z sensorów będą przekazywane do tych ośrodków za pomocą sieci lokalnej.
W systemach VTS poszczególnych urzędów morskich dane radarowe z dołączonych sensorów oraz dane AIS mają podlegać wieloźródłowemu przetwarzaniu (multi sensor cracking). Interfejsem użytkownika w centrach VTS mają być stacje robocze VTS wyposażone w aplikacje mapowe, bazodanowe, systemy zapisu i odtwarzania oraz systemy łączności. Służby ruchu kapitanatów portów mają być wyposażone w stacje robocze właściwego systemu VTS. Obrazy z zainstalowanych kamer CCTV mają być dostępne na monitorach w centrach VTS i kapitanatach.
Przetworzone dane z sensorów i baz danych poszczególnych systemów VTS mają być przesyłane w ujednoliconych standardach przez sieć WAN do centralnej aplikacji systemu. Rolę aplikacji centralnej KSBM będzie pełnić używany obecnie System Wymiany Informacji Bezpieczeństwa Żeglugi (SWIBŻ).
3. Centrum VTS zatoka gdańska
3.1 VTS zatoka Gdańska
Pierwszym miejsce, które udało nam się zwiedzić było centrum VTS Zatoka Gdańska. Dowiedziałyśmy się przede wszystkim tego, że w celu zwiększenia bezpieczeństwa żeglugi oraz zdolności reagowania w niebezpieczeństwie na wodach Zatoki, Dyrektor Urzędu Morskiego w Gdyni ustanowił dnia 1 maja 2003r. System Nadzoru Ruchu Statków VTS Zatoka Gdańska (ang. Vessel Traffic Services Gulf of Gdańsk).
System jest realizowany przez służbę Centrum VTS, a nadzór i kontrolę nad przestrzeganiem przepisów sprawuje nikt inny jak Dyrektor Urzędu Morskiego w Gdyni. W skład dyżurnej służby Centrum VTS wchodzi Starszy Operator VTS i dwóch Operatorów VTS. Służby Centrum VTS Zatoka Gdańska pracują przez całą dobę bez przerwy. Językiem pracy Centrum VTS jest język angielski i polski. Na obszarze portów i red Gdyni i Gdańska funkcję VTS pełnią służby ruchu właściwego Kapitanatu Portu.


Ponadto została nam przedstawiona struktura systemu, która wygląda następująco:

Jak zostało wspomniane wcześniej, system powstał w celu zmniejszenia zagrożenia na obszarze Zatoki Gdańskiej. Aby operatorzy mogli prowadzić bezpieczną obserwację obszaru, system musi posiadać wiarygodne źródła informacji na temat znajdujących się w obszarze jednostek.
Takimi źródłami i podległymi systemami są:
– system radarowy VTS Zatoka Gdańska
– system łączności VHF + DSC
– system CCTV
– baza danych DMIS
– dane hydrometeorologiczne z czujników VTS
– krajowa sieć AIS
– europejski system wymiany informacji SafeSeaNet
– system monitorowania i prognozowania rozlewów CleanSeaNet, Seatrack Web
– system bazodanowy inspekcji państwa portu (PSC) THETIS
– bazy danych statków „banned” i SHT (single hull tank)
– systemy monitorowania oznakowania nawigacyjnego SCADA, SYMON
– system LRIT
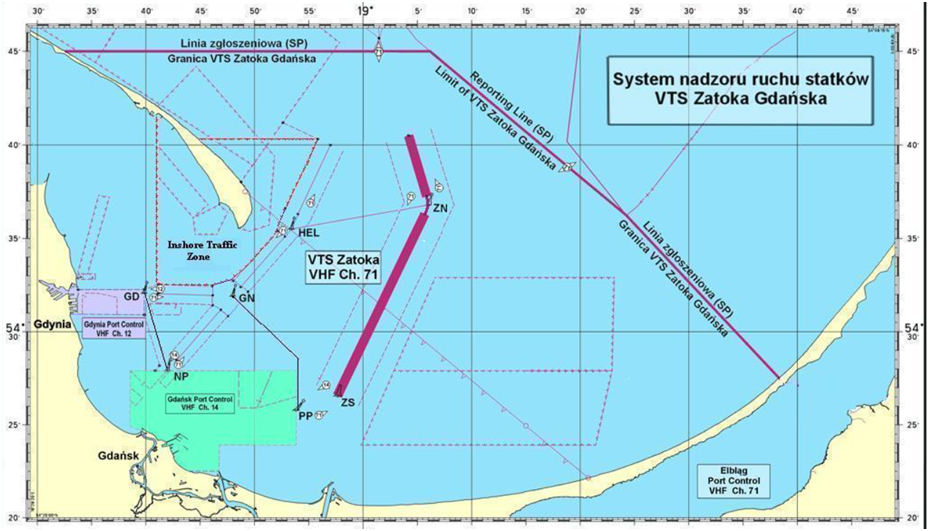
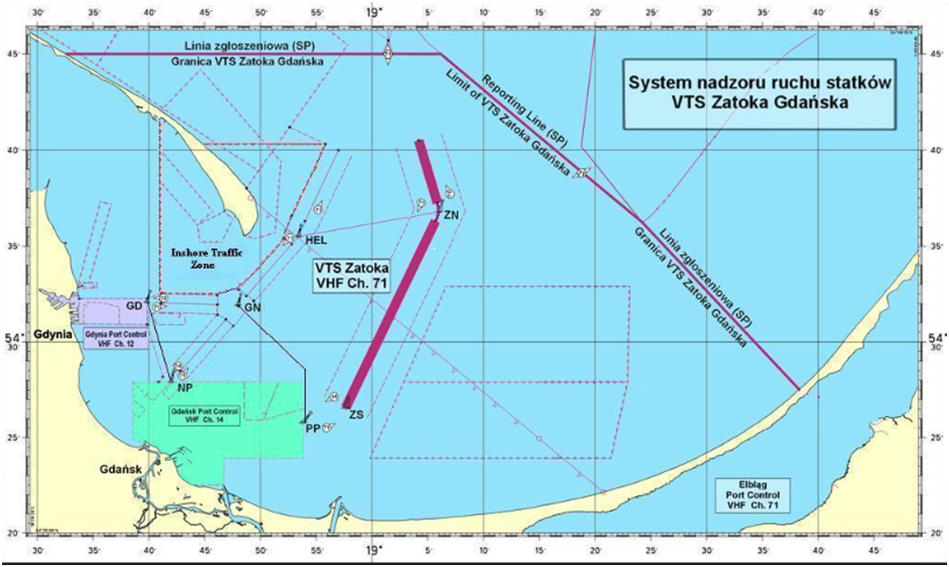
Obszar działania Systemu VTS Zatoka Gdańska wyznaczają zewnętrzne granice obowiązkowego systemu zgłaszania statków „GDANREP”, określone współrzędnymi geograficznymi:
a) 54°45,00N 18°32,56E
b) 54°45,00N 19°06,10E
c) 54°36,20N 19°24,20E
d) 54°27,49N 19°38,30E [1].
Podane wyżej współrzędne najlepiej obrazuje mapa znajdująca się poniżej.
W ramach funkcjonowania Systemu VTS operatorzy mogą udzielać statkom zalecenia, ostrzeżenia i instrukcje określonego zachowania się, jeżeli uznają, że parametry ich ruchu lub pozycja zagrażają bezpieczeństwu żeglugi, naruszają obowiązujące przepisy portowe lub konieczna jest właściwa organizacja ruchu morskiego.
System meldunkowy VTS jest obowiązkowy dla statków:
• wszystkich statków pasażerskich;
• statków towarowych o tonażu brutto 150 i więcej;
• wszystkich statków bez względu na tonaż, które przewożą ładunki niebezpieczne lub zanieczyszczające;
• wszystkich statków bez względu na tonaż zajętych holowaniem;
• wszystkich statków, które w skutek wyjątkowych okoliczności stwarzają ryzyko kolizji lub zanieczyszczenia środowiska;
• pozostałe statki wyposażone w urządzenia łączności VHF mogą uczestniczyć dobrowolnie w systemie meldunkowym
3.2 Służba ruchu kapitanatu portu Gdynia


Przykładowe wydziały Urzędu Morskiego w Gdyni i ich funkcje:
• Inspektorat Ochrony Środowiska Morskiego (IOŚ)
– ochrona środowiska morskiego przed zanieczyszczeniem wskutek korzystania z morza oraz przez zatapianie odpadów i innych substancji,
– nadzór i kontrola stanu czystości obszarów morskich Rzeczypospolitej Polskiej przy użyciu statków powietrznych oraz zdjęć satelitarnych,
– nadzór nad zwalczaniem rozlewów olejowych.
• Baza Oznakowania Nawigacyjnego (BON)
– utrzymywanie oznakowania nawigacyjnego, w tym okresowe wystawianie i zdejmowanie nawodnego oznakowania nawigacyjnego,
– praca na rzecz ciągłego, bezawaryjnego funkcjonowania lądowego i morskiego oznakowania nawigacyjnego na obszarach administrowanych przez Urząd,
– kontrola pozycji znaków nawigacyjnych oraz prawidłowości ich funkcjonowania,
– wykonywanie remontów i konserwacji technicznych urządzeń oznakowania nawigacyjnego.
• Kapitanat Portu Gdynia (KGA)
– nadzór nad ogólnym stanem bezpieczeństwa żeglugi oraz kontrola ruchu statków w porcie, na redzie i w pozostałych administrowanych akwenach,
– wykonywanie służby kontroli ruchu statków w systemie monitorowania ruchu morskiego i przekazywanie informacji właściwym instytucjom i służbom,
– prowadzenie ewidencji statków korzystających z portu
3.3. Centrum monitorowania systemów nawigacyjnych zlokalizowane w budynku radiolatarni Gdynia
Do zakresu działania w szczególności należy:
1. utrzymywanie oznakowania nawigacyjnego, w tym okresowe wystawianie i zdejmowanie nawodnego oznakowania nawigacyjnego;
2. praca na rzecz ciągłego, bezawaryjnego funkcjonowania lądowego i morskiego oznakowania nawigacyjnego na obszarach administrowanych przez Urząd;
3. kontrola pozycji znaków nawigacyjnych oraz prawidłowości ich funkcjonowania;
4. wykonywanie remontów i konserwacji technicznych urządzeń oznakowania nawigacyjnego;
5. obsługa i konserwacja urządzeń radionawigacyjnych;
6. wydobywanie, we współpracy z innymi komórkami organizacyjnymi, przeszkód nawigacyjnych;
7. prowadzenie książek obiektów budowlanych (budynków i budowli, w tym hydrotechnicznych) oznakowania nawigacyjnego podległych Bazie;
8.merytoryczna współpraca z Wydziałem Oznakowania Nawigacyjnego w zakresie funkcjonowania oznakowania nawigacyjnego;
9. merytoryczna współpraca z Wydziałem Usług Remontowych Taboru Pływającego w zakresie uzgadniania remontów oraz wykonywania drobnych napraw jednostek pływających Urzędu;
10. współpraca z kapitanatami portów w zakresie wystawiania i zdejmowania oznakowania nawigacyjnego oraz zabezpieczenia eksploatacyjnego taboru pływającego tych komórek;
11. współpraca z zarządami portów w zakresie konserwacji i obsługi bieżącej pław;
12. wykonywanie usług na rzecz podmiotów zewnętrznych w zakresie oznakowania nawigacyjnego
4. Służba ruchu kapitanatu portu Gdynia
Służba ruchu kapitanatu Portu Gdynia znajduje się w budynku Kapitanatu Portu. Kapitanat Portu jest jednostką organizacyjną urzędu morskiego sprawująca władzę nad ruchem statków w akwatorium portowym oraz przyległej redzie. Właściwość terytorialna Kapitanatu Portu Gdynia rozciąga się od mola w Sopocie do południowej granicy redy łącznie z redą i kotwicowiskami oraz w pasie 1 Mm od północnej granicy redy do przystani rybackiej w Rewie.



Zadania
Do zadań służby ruchu należą m.in.:
- nadzór nad ogólnym stanem bezpieczeństwa żeglugi oraz kontrola ruchu statków
w porcie, na redzie i w pozostałych administrowanych akwenach, - wykonywanie służby kontroli ruchu statków w systemie monitorowania ruchu morskiego i przekazywanie informacji właściwym instytucjom i służbom,
- wprowadzanie, na czas oznaczony, zakazu lub ograniczenia ruchu w porcie,
- prowadzenie ewidencji w dziennikach portowych wydarzeń związanych z ruchem
i obsługą statków oraz bezpieczeństwem żeglugi w porcie oraz prowadzenie innych dokumentów dotyczących wydarzeń zaistniałych na terenie portu, - prowadzenie ewidencji statków korzystających z portu.
Infrastruktura radarowa
Na potrzeby monitorowania i zarządzania ruchem w obrębie portów (oraz redy i kotwicowiska), dostępne są trzy radary portowe:
- Hel – radar portowy,
- Gdynia „S” – nabrzeże Wendy,
- Gdańsk – Nowy Port.
Komunikacja radiowa
Podstawowym środkiem komunikacji ze statkami jest system łączności VHF oraz selektywnego wywołania VHF DSC. Służba ruchu statków korzysta z częstotliwości roboczej na kanale 12. System korzysta z sześciu zdalnych stacji nadawczo-odbiorczych VHF i VHF DSC firmy Elvys umieszczonych w następujących lokalizacjach:
- Radiolatarnia Rozewie,
- Radiolatarnia Hel,
- Wieża Kapitanatu Gdynia,
- Wieża Kapitanatu Gdańsk,
- Radiolatarnia Krynica,
- Stacja dalekiego zasięgu umieszczona na wieży platformy Baltic Beta.
Kamery dalekiego zasięgu
Kolejnym narzędziem wspomagającym pracę operatorów jest system kamer dalekiego zasięgu (CCTV). Służba ruchu korzysta z kamer dedykowanych dla VTS Zatoka Gdańska. Kamera dalekiego zasięgu ulokowana jest na latarni morskiej Hel (jej zasięg wynosi 7 mil morskich). Pięć pozostałych kamer pełni rolę wspomagania służb dyżurnych kapitanatów i bosmanatów. Kamery te umieszczone są w następujących portach i przystaniach morskich:
- Hel,
- Gdynia,
- Gdańsk Nowy Port,
- Gdańsk Port Północny,
- Górki Zachodnie.
Rejestrowanie wizyt statków
Służby VTS i służby kapitanatów portów pracują na tej samej aplikacji bazodanowej (DMIS). Aplikacja pozwala na rejestrowanie odbywającego się ruchu statków, wejść i wyjść, miejsc postoju i czasów zacumowania lub odcumowania dla podróży awizowanych – bieżących
i historycznych. Dzięki takiemu rozwiązaniu obsługa statku od momentu jego awizacji (zgłoszenia chęci wejścia statku do portu przez agenta) aż do opuszczenia obszaru kontroli ruchu jest dostępna dla służb, które zobowiązane są wprowadzać dane na różnych etapach procesu. Aplikacja DMIS jest bazą danych, powiązana dynamicznie z aplikacją mapy elektronicznej iMare, z której korzystają operatorzy VTS Zatoka, VTMS Szczecin-Świnoujście i służby kapitanatów portów.
Serwis hydrometeorologiczny
Służba ruchu statków, tak samo jak służba VTS, posiada Serwis osłony hydrometeorologicznej zapewniony jest przez Instytut Meteorologii i Gospodarki Wodnej (IMGW) oraz dane własne pochodzące z czujników hydrometeorologicznych. Czujniki te rozmieszczone są w wybranych miejscach istotnych z punktu widzenia bezpiecznej żeglugi oraz uzyskania miarodajnych pomiarów dla wejścia i wyjścia z portu oraz wydawania zwolnień z usług pilotowych
i holowniczych. Następujące parametry są określane z czujników hydrometeorologicznych:
- kierunek i prędkość wiatru,
- kierunek i prędkość prądu,
- poziom wody.
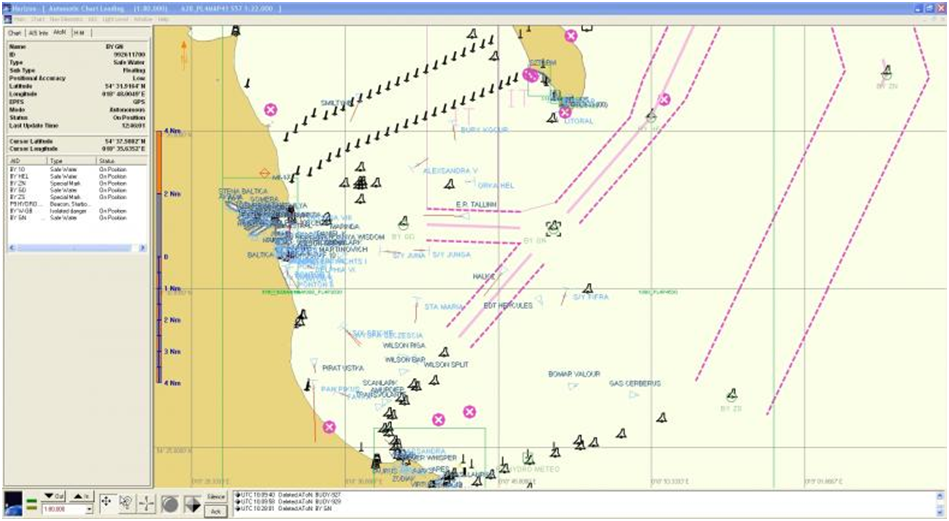
5. System monitorowania oznakowania nawigacyjnego ,,HORIZON/SYMON’’ oraz ,,PHAROMAC/ZATOKA Gdańska’’
5.1 System monitorowania stacji ATON AIS HORIZON/SYMON
Horizon jest oprogramowaniem zarządzającym ruchem statków dla stacji brzegowej i centrum VTS w zasiegu „widzialności” fal radiowych zakresu VHF. Komunikacja ta jest transponderowym systemem pozwalającym jego uczestnikom na wzajemne śledzenie poprzez sieć AIS (Automatyczny System Indentyfikacji). Poprzez sieć AIS różnego rodzaju dane wysyłane są m.in przez pławy i dalby nawigacyjne. Operator statkowego transpondera AIS jest na bieżąco informowany czy dana pława pracuje prawidłowo, czy też musi zachować szczególną ostrożność w przypadku wystąpienia jej alarmu.
SyMon 2 jest aplikacją pozwalającą operatorowi Centrum Monitorowania Systemów Nawigacyjnych na pełną kontrolę nad znakami nawigacyjnymi, na których zainstalowany jest system monitorowania oparty na VHF/AIS. Po odpowiednim skonfigurowaniu systemów na poszczególnych znakach, są one widoczne na statkowych transponderach AIS.
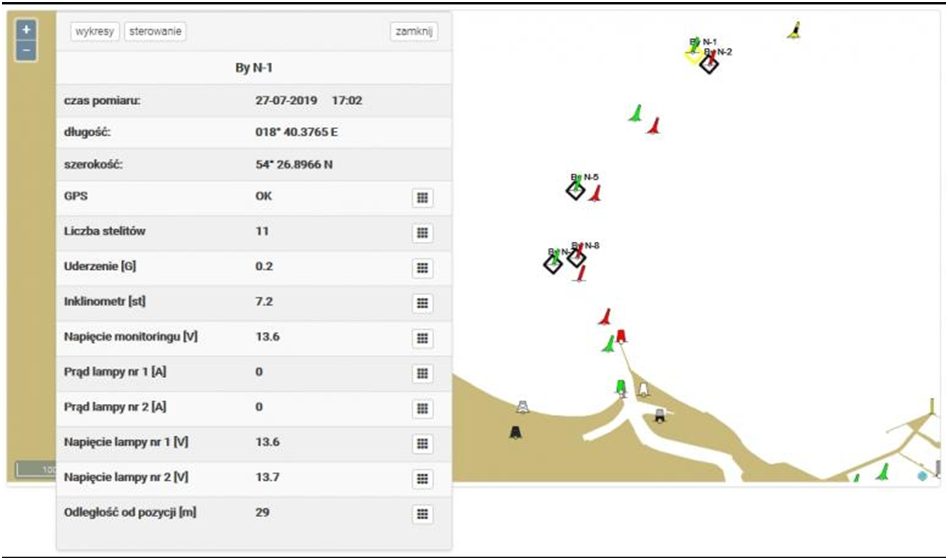
Informacja zawarta na ekranie określa aktualne położenie pławy względem prawidłowej pozycji, stan akumulatorów, załączenie i wyłączenie światła, jej wychylenie od pionu, możliwe jej uderzenie i inne.
Każda wiadomość odebrana i odbiegająca od zadanych parametrów powoduje wystąpienie alarmu na komputerze operatora systemu.
5.2 System monitorowania znaków nawigacyjnych PHAROMAC/ ZATOKA Gdańska
Informacja zawarta na ekranie obrazuje pławy oraz znaki lądowe. Określa aktualny stan akumulatorów, sprawność żarówek, poprawność komunikacji oraz zapewnia synchronizacje świateł nawigacyjnych.
Każda wiadomość odebrana i odbiegająca od zadanych parametrów powoduje wystąpienie alarmu (oznaczenie czerwone) na komputerze operatora systemu.

6. Sieć stacji bazowych AIS-PL i radionamierników VHS
6.1 Centrum VTS zatoka Gdańska
W skład dyżurnej służby Centrum VTS wchodzi Starszy Operator VTS i dwóch Operatorów VTS z odpowiednimi kursami i świadectwami oraz umiejętnościami obowiązującej komunikacji w języku angielskim i polskim. Służby Centrum VTS Zatoka Gdańska pracują przez całą dobę bez przerwy i przez cały rok w celu zapewnienia bezpieczeństwa żeglugi na zatoce oraz portów znajdujących się w jej zasięgu. Na obszarze portów i red Gdyni i Gdańska funkcję VTS pełnią służby ruchu właściwego Kapitanatu Portu. Nadzór i kontrolę nad przestrzeganiem przepisów VTS sprawuje Dyrektor Urzędu Morskiego w Gdyni.
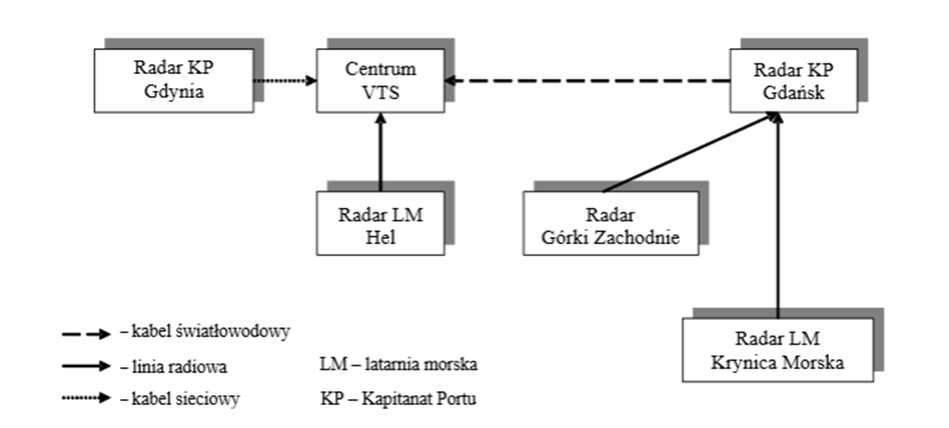
Głównym źródłem informacji obrazowej dostarczanej do centrum VTS jest sieć radarowych stacji brzegowych. System identyfikacji i śledzenia VTS Zatoka Gdańska działa z wykorzystaniem:
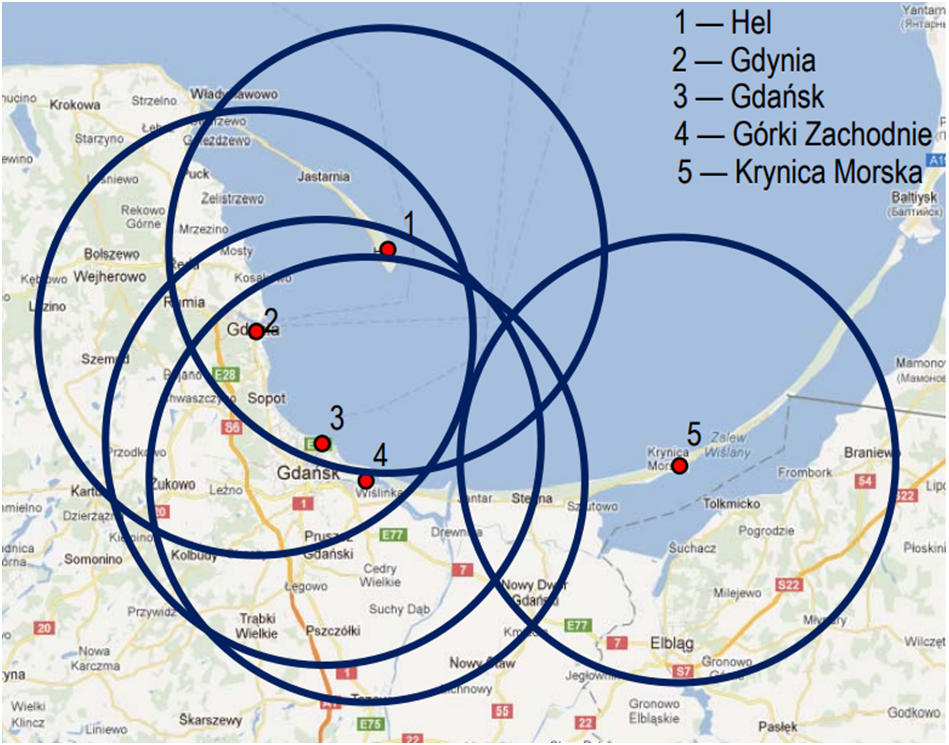
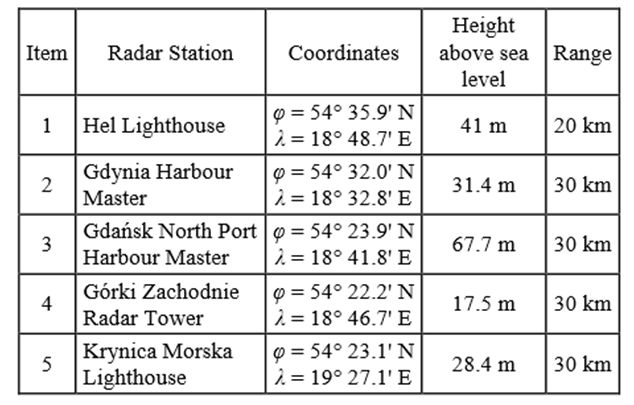
- Pięciu radarów brzegowych rozmieszczonych wokół Zatoki Gdańskiej (znajdujących się w latarni morskiej w Helu, Kapitanacie Portu Gdynia, KapitanaciePortu Gdańsk, wieży radarowej Górki Zachodnie, latarni morskiej w Krynicy Morskiej),
- Systemu automatycznej identyfikacji statków (AIS) w oparciu o stację bazową, na latarni morskiej Hel ( AIS oraz radionamierniki VHS zostaną szerzej omówione w dalszej części sprawozdania),
- Radionamierników RDF (Radio Direction Finder) na latarniach Hel i Krynica Morska,
- Kamer wizyjnych CCTV (Closed-circuit television),
- Sensorów hydrometeorologicznych,
- Systemu obowiązkowych meldunków z wykorzystaniem VHF.
Stacje brzegowe VTS ich zasięgi i połączenia:
Gdynia — Gdańsk Port Północny > łącze światłowodowe
Gdynia — Hel > radiolinia
Gdańsk — Krynica Morska > radiolinia
Gdańsk — Górki Zachodnie > radiolinia.
Na wieży platformy wydobywającej ropę i gaz – Baltic Beta, umieszczony został radar brzegowy dalekiego zasięgu (wchodzący w skład Krajowego Systemu Bezpieczeństwa Morskiego (KSBM)), który może być wykorzystany przez System VTS. Na potrzeby monitorowania i zarządzania ruchem w obrębie portów (oraz redy i kotwicowiska), dostępne są trzy radary portowe:
Hel – radar portowy, Gdynia „S” – nabrzeże Wendy, Gdańsk – Nowy Port.
Na obszarze Zatoki Gdańskiej, na potrzeby Systemu VTS, pracuje sześć radarów brzegowych, które umieszczone są w następujących lokalizacjach:
Władysławowo, Latarnia Morska Hel, Wieża Kapitanatu Portu Gdynia, Wieża Kapitanatu Portu Gdańsk- Port Północny, Wieża radarowa Górki Zachodnie, Latarnia Morska Krynica Morska.


WNIOSKI: Przy okazji wizyty w Centrum VTS Zatoka Gdańska była możliwość zaobserwowania struktury działania systemu, a także zapoznania się z wyposażeniem. Bardzo nowoczesny sprzęt wymagający rozległej wiedzy nie tylko na temat jego użytkowania lecz także możliwości, ograniczeń i struktury pozwala na zapewnienie bezpieczeństwa w rejonie. odpowiedzialności działania systemu. Konieczność zabezpieczenie służby 24h na dobę przez cały rok pokazuje jak ważne jest odpowiednie zabezpieczenie działania Zatoki Gdańskiej w zakresie morskim przez odpowiednie służby. Ponadto pełnienie służby przez 2 operatorów pokazuje zagęszczenie ruchu jakie może wystąpić w rejonie ich odpowiedzialności. Również kwestią na którą warto zwrócić uwagę jest potrzeba komunikacji i koordynacji z innymi służbami tak jak omawiany w dalszej części sprawozdania Kapitanat Portu w zakresie przekazania obowiązków i odpowiedzialności w celu możliwości dalszego kontynuowania wykonania bezpiecznej operacji przez jednostki.
KSBM – Krajowy System Bezpieczeństwa Morskiego
System KSBM ma zapewniać infrastrukturę techniczną do:
- Kontroli i monitorowania ruchu morskiego za pomocą sieci radarów brzegowych i stacji brzegowych systemu automatycznej identyfikacji statków (AIS),
- Łączności w niebezpieczeństwie i do celów bezpieczeństwa (GMDSS) oraz łączności operacyjnej Polskiej Morskiej Służby Poszukiwania i Ratownictwa (SAR),
- Wymiany informacji w ramach narodowego systemu SafeSeaNet, utworzonego zgodnie z wymaganiami art. 91.1. Ustawy o bezpieczeństwie morskim,
- Podwyższenia dokładności pozycji geograficznej określanej wzdłuż polskiego wybrzeża za pomocą systemu GPS poprzez zapewnienie transmisji poprawek różnicowych ze stacji referencyjnych zainstalowanych w Dziwnowie i Rozewiu.
W ramach nadzoru nad ruchem statków w systemie KSBM Służba VTS może wydawać statkom instrukcje, zalecenia i nakazy.
Ponadto wszyscy użytkownicy KSBM powinni być wyposażeni w terminale systemu SWIBŻ (System Wymiany Informacji Bezpieczeństwa Żeglugi) wraz z infrastrukturą teleinformatyczną spełniające następujące funkcje.
Prezentację:
• danych z sensorów wewnętrznych KSBM: VTS, VTMS, radarów portowych, systemu AIS-PL, sensorów hydrometeorologicznych, baz danych PHICS, radionamierników, itp.
• danych z systemów monitorowania za pomocą stacji brzegowych AIS, zewnętrznych w stosunku do AIS-PL (HELCOM, EMSA);
• danych z radarów brzegowych niewchodzących w skład KSBM (Straży Granicznej i Marynarki Wojennej RP);
| Rys. 22Zakres projektu modernizacji nadzoru ruchu – https://www.umgdy.gov.pl/wp-content/uploads/2020/02/IRM_05.png |
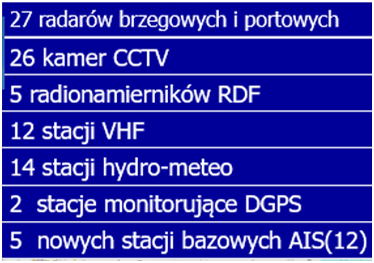
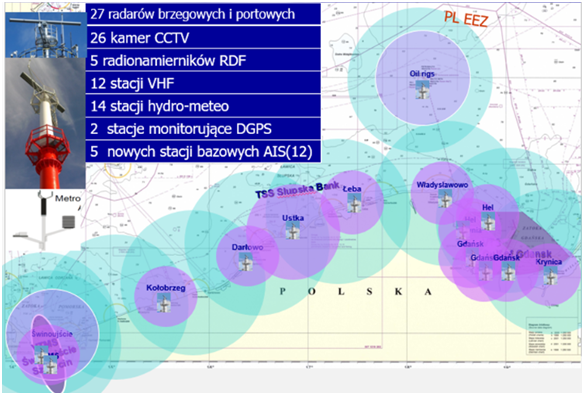
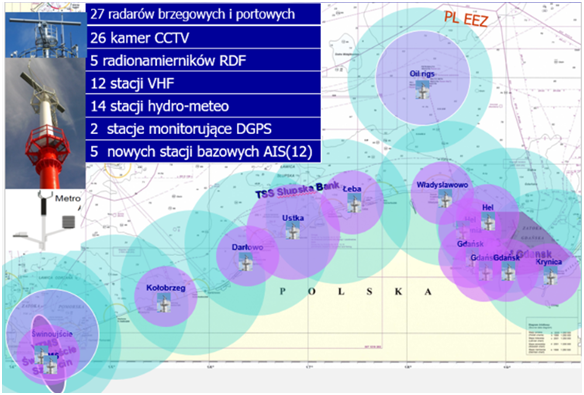
• prognoz pogody oraz ostrzeżeń nawigacyjnych i meteorologicznych. W ramach budowy KSBM rozwinięta została sieć stacji radarowych, kamer, radionamierników, stacji VHF, stacji hydro-meteo, stacji DGPS i AIS oraz ujednolicono narzędzia jakimi dysponują służby zarządzające i monitorujące ruchem statków. Wszystkie większe porty zostały wyposażone w jednakowe konsole.
6.2 Służba ruchu kapitanatu portu Gdynia
Podstawowym obowiązkiem kapitanatu Portu Gdynia jest nadzór nad ogólnym stanem bezpieczeństwa żeglugi oraz kontrola ruchu statków w porcie, na redzie i w pozostałych administrowanych akwenach. Zakres obowiązków i odpowiedzialności jest rozległy, składa się z 48 punktów wymienionych na stronie urzędu morskiego (https://www.umgdy.gov.pl/?page_id=605 )

Umiejscowienie Kapitanatu Portu w systemie KSBM:
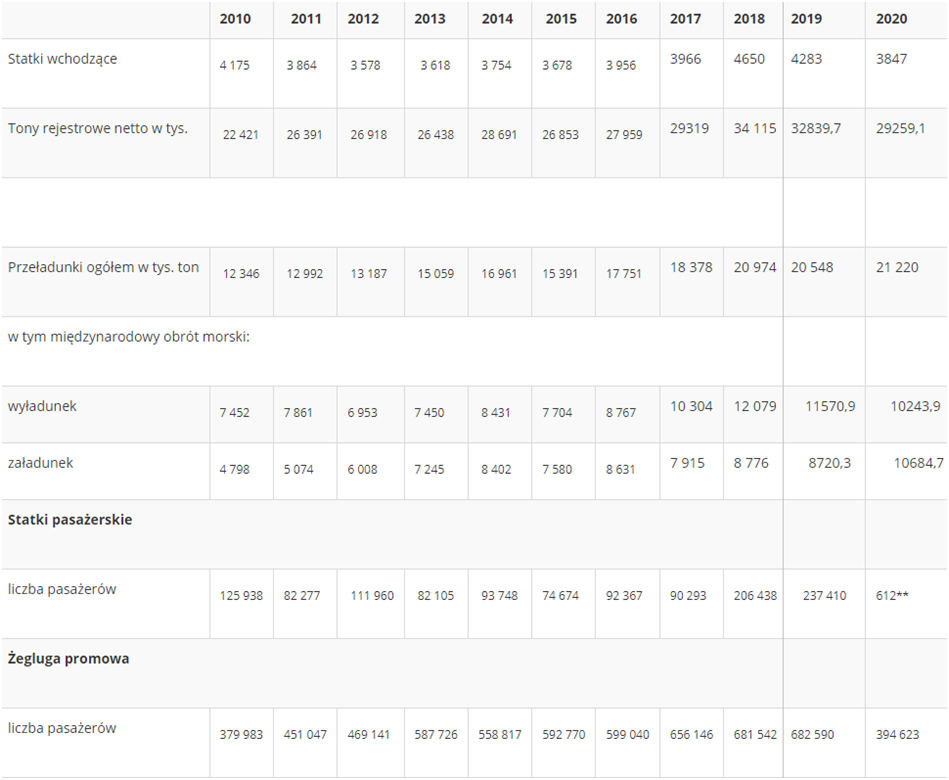
Wnioski: Na podstawie wizyty w Kapitanacie Portu Gdynia można było zobaczyć, że jest on podległy pod VTS i realizuje zadania już bezpośrednio dotyczące bezpieczeństwa portu. Znajdujące się tam systemy oraz urządzenia zbliżone do obecnych przy konsoli operatora systemu VTS potwierdzają zbliżoną rolę działania służby, której podstawowym elementem jest zapewnienie bezpieczeństwa. Stała modernizacja i rozwój elementów portu podkreślają ważność istoty oraz potrzebę organizacji służby, a także odpowiedzialność i wysokie kwalifikacje oficerów. Znaczna liczba oraz złożoność systemów umożliwiających prawidłowe funkcjonowanie systemu, a także kontrolę i spełnienie wymagań stawianych dla Kapitanatu Portu. Ponadto liczba ładunku, który obracany jest w porcie jest bardzo wysoka, co wskazuje na duży ruch jednostek, a to natomiast na potrzebę odpowiedniej koordynacji ich ruchu związanego z wejściem i wyjściem z portu oraz także postoju przy nabrzeżu, kotwicowisku lub redzie.
6.3 Centrum Monitorowania Systemów Nawigacyjnych zlokalizowane w budynku Radiolatarni Gdynia
Głównym zadaniem Centrum Monitorowania Systemów Nawigacyjnych jest całodobowe monitorowanie morskich i lądowych znaków nawigacyjnych oraz systemów radionawigacyjnych (DGPS, RTK, AIS).

Siedziba znajdująca się w porcie w Gdyni odpowiada za sprawne działanie ponad 100 znaków nawigacyjnych, zapewniając ich ciągłą prawidłową pracę w celu zapewnienia bezpiecznej żeglugi w rejonie ich odpowiedzialności. Prozaiczna wymiana żarówek natomiast na morzu jest zdecydowanie bardziej skomplikowana, gdyż przed jej wymianą należy ją odpowiednio zaprogramować oraz w celu jej założenia dopłynąć i wejść na znak nawigacyjny. Jednak potrzeba zapewnienia nie przerwanego działania systemu nawigacyjnego jest podstawą, gdyż umożliwia bezpieczną żeglugę w danym rejonie. Brak ciągłości i jednolitości, a także modernizacji oznakowania mógłby doprowadzić do chaosu i w konsekwencji wielu wypadków. Monitorowanie poprawności działania odbywa się całodobowo przez cały rok, wykorzystując środki łączności otrzymywane są powiadomienia o niesprawnościach, które w celu zachowania ciągłości bezpieczeństwa są jak najszybciej usuwane.
6.4 System AIS
System Automatycznej Identyfikacji, AIS (ang. Automatic Identification System, AIS) – system automatycznej łączności opracowany w końcu XX wieku i rozpowszechniony na początku XXI. Zapewnia automatyczną wymianę danych, przydatnych do uniknięcia kolizji między statkami oraz identyfikujący statek dla brzegowych systemów nadzorujących ruch statków (VTS).
Według wymagań V Rozdziału Konwencji SOLAS opracowanej przez IMO, system AIS powinien być zainstalowany na:
- wszystkich statkach o pojemności brutto 300 i więcej, zatrudnionych w żegludze międzynarodowej,
- wszystkich statkach o pojemności brutto 500 i więcej, niezatrudnionych w żegludze międzynarodowej,
- wszystkich statkach pasażerskich, niezależnie od rozmiaru.
Dane przesyłane przez system AIS:
- Informacje dynamiczne: pozycja statku, jego kurs i prędkość, informacje o zmianie kursu oraz status statku,
- Dane statyczne: nazwa statku, jego sygnał wywoławczy (Call Sign), bandera, numery IMO oraz MMSI, rok budowy, typ oraz wymiary statku,
- Dane dotyczące danej podróży: port przeznaczenia, spodziewany czas przybycia (ETA), zanurzenie.
Podział czasu systemu AIS.
Aby uniknąć wzajemnego zagłuszania, transpondery systemu AIS działają w systemie podziału czasu. Transpondery typu Class-A transmitują dane według protokołu SOTDMA (Samoorganizowany wielodostęp w dziedzinie czasu), co w skrócie polega na tym, że każdy statek nadaje tylko przez krótki czas w tzw. „szczelinach czasowych”, powtarzając nadawanie w odstępach zależnych od prędkości i zmiany kursu: około trzech minut dla statków zatrzymanych, około 10 sekund dla statków poruszających się z prędkością do 14 węzłów, 6 sekund z prędkością 14-23 węzłów, 2 sekundy z prędkością powyżej 23 węzłów. Jeśli statek jednocześnie zmienia kurs, czasy te ulegają odpowiedniemu skróceniu. Protokół SOTDMA zapewnia kilka tysięcy „okien czasowych” w ciągu minuty.
Specjalnie do zastosowania w tańszych transponderach typu Class-B został opracowany prostszy protokół transmisji CSTDMA, który jest w pełni kompatybilny ze stosowanymw urządzeniach Class-A protokołem SOTDMA, przy czym transmisja w protokole SOTDMA ma zawsze wyższy priorytet niż transmisja w protokole CSTDMA.
Zasięg systemu AIS pracuje na częstotliwości UKF, zasięg zależy od wysokości zamontowanej anteny. Zgodnie z założeniami przy antenie umiejscowionej na wysokości 15 m ponad poziom morza zasięg wynosi 15–20 mil morskich. Większe statki, na których antena znajduje się znacznie wyżej, odbierają sygnały z odległości ok. 40–60 mil morskich. W warunkach bardzo dobrej propagacji zdarza się odbierać sygnały ze statków oddalonych nawet o 150 mil.
System AIS w Polsce:
- AIS – Automatyczna Identyfikacja Statków,
- 12 stacji bazowych SAAB R40,
- 9 na wybrzeżu (latarnie morskie),
- 1 na platformie Petrobaltic,
- 2 w głębi lądu na rzece Odrze.
Sprzęt AIS na statkach:
Statkowe urządzenie AIS składa się z urządzenia nadawczo-odbiorczego UKF (transpondera), pracującego na częstotliwościach 161,975 MHz (kanał A) i 162,025 MHz (kanał B) połączonego z odpowiednio zaprogramowanym komputerem. Do komputera spływają automatycznie dane o pozycji i ruchu statku z GPS i odpowiednich czujników (log, żyrokompas, echosonda). Dane te, wraz z informacjami wprowadzonymi ręcznie (nazwa jednostki, sygnał wywoławczy, numer MMSI, port przeznaczenia, zanurznie, liczba osób na pokładzie, a także położenie anteny AIS na pokładzie jednostki i jej podstawowe wymiary) są nadawane w specjalnym formacie i mogą być odczytane przez urządzenia AIS na statkach w pobliżu (do kilkudziesięciu mil morskich) i stacjach kontroli ruchu. AIS jest połączony z systemami antykolizyjnymi statku oraz VDR (rejestratorem parametrów statku tzw. czarna skrzynka). dane odbierane przez system są wyświetlane na ekranach radarów. Dzięki temu rozwiązaniu oficer wachtowy ma ułatwione zadanie w podjęciu decyzji o uniknięciu kolizji.
Wykorzystanie danych AIS:
- Analiza statystyczna,
- Wykreślanie tras historycznych,
- Postępowania dowodowego przed sądem (Izbą Morską),
- Zarządzanie ruchem.
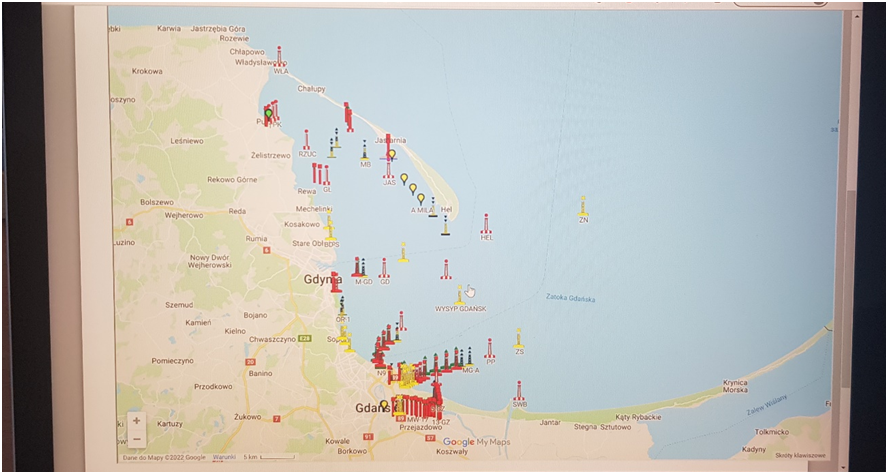
Przykładowe statystyki na podstawie zapisanych danych na AIS. Na rysunku widoczne są najczęściej uczęszczane trasy przez statki, które używały systemu AIS.

System AIS umożliwia nam uzyskiwanie informacji na temat jednostek pływających z różnych regionów świata. Uzyskujemy takie informacje jak: prędkość, kurs, zanurzenie, nazwę statku oraz kraj pochodzenia. Wyświetlane są również dane o porcie do którego zmierza.


| Rys. 33 Pierwsza na świeciemiędzynarodowasieć wymiany danych AIS -https://docplayer.pl/11914519-Morskie-systemy-czasu-rzeczywistego-implementacja-w-polsce.html |
Pierwsza na świecie międzynarodowa siec wymiany danych AIS powstała na Bałtyku pod patronatem Komisji Helsińskiej w roku 2005. HELCOM EWG członkowie:
- Szwecja,
- Finlandia,
- Rosja,
- Estonia,
- Litwa,
- Łotwa,
- Polska,
- Niemcy,
- Dania
- Norwegia.

6.5 Radionamierniki VHF
Fale metrowe, VHF (od ang. very high frequency) – zakres fal radiowych (pasmo radiowe) o częstotliwości od 30 do 300 MHz co odpowiada długości fali od 1 metra do 10 metrów.
VHF współpracuję z RDF (ang. Radio Direction Finding) – zdefiniowany jako lokalizacja radiowa, która wykorzystuje odbiór fal radiowych do określania kierunku, w którym znajduję się stacja radiowa lub obiekt usytuowany. Może to dotyczyć komunikacji radiowej lub innych form komunikacji bezprzewodowej, w tym wykrywania i monitorowania sygnałów radiowych. Łącząc informacje o kierunku z dwóch lub więcej odpowiednio rozmieszczonych odbiorników (lub pojedynczy odbiornik mobilny), źródło transmisji można zlokalizować za pomocą triangulacji . Znajdowanie kierunku radiowego jest wykorzystywane w nawigacji statków i samolotów, do lokalizowania nadajników awaryjnych w celu poszukiwania i ratowania , do śledzenia dzikich zwierząt oraz do lokalizowania nadajników nielegalnych lub zakłócających.
Systemy RDF mogą być używane z dowolnym źródłem radiowym, chociaż bardzo długie fale (niskie częstotliwości) wymagają bardzo dużych anten i są zazwyczaj używane tylko w systemach naziemnych. Te długości fal są jednak wykorzystywane w morskiej nawigacji radiowej , ponieważ mogą podróżować na bardzo duże odległości „poza horyzontem”, co jest cenne dla statków, gdy linia wzroku może wynosić tylko kilkadziesiąt kilometrów. Do zastosowań lotniczych, gdzie horyzont może sięgać setek kilometrów, można wykorzystać wyższe częstotliwości, co pozwala na zastosowanie znacznie mniejszych anten. Automatyczny lokalizator kierunku , który można dostroić do radiolatarni zwanych radiolatarnie bezkierunkowe
| Rys. 34 Radionamierzanie transmisji VHF przez RDF – fotografia zrobiona w trakcie wizyty studyjnej |
Anteny wykorzystywane przez RDF:

- Znajdowanie kierunku wymaga anteny kierunkowej (bardziej czułej w niektórych kierunkach niż w innych),
- Prostą formą anteny kierunkowej jest antena pętlowa . Składa się z otwartej pętli z drutu na izolującej formie lub metalowego pierścienia, który tworzy same elementy anteny,
- Antena czujnikowa nie ma właściwości kierunkowych, ale ma taką samą czułość jak antena pętlowa,
- Antena dipolowa ma podobne właściwości i jest podstawą anteny Yagi.
WNIOSKI:
- System AIS ma pokrycie wzdłuż całej polskiej linii brzegowej. Dane z systemu AIS umożliwiają otrzymywanie kluczowych informacji.
- Pokrycie wielu stref przez więcej niż jeden AIS zwiększa jego niezawodność.
- System AIS pozwala na analizę danych z ostatnich 30 dni. Pozwala to na określić gdzie jest największy ruch statków. Poszerza horyzonty myślowe i umożliwia rozwój i analizę ewentualnych zmian w ruchu.
- Zasięg systemu AIS jest uzależniony od wysokość na jakiej jest zamontowana na statku oraz warunków pogodowych, które wpływają na propagacje fali.
- System AIS udostępnia dane, które może zobaczyć powszechnie każdy użytkownik.
- Radionamierniki RDF ściśle współpracują z VHF, aby szybciej i dokładniej określić gdzie dany użytkownik jest.
7. System wymiany informacji SafeSeaNet, SWIBŻ, PHICS
Na morzu informacja ma wartość niewymierną w zakresie bezpieczeństwa. Uzyskanie informacji w odpowiednim miejscu i czasie, to uratowane życie ludzkie, mienie, czy też zażegnana katastrofa ekologiczna. Szczególne zagrożenia stwarza transport ładunków niebezpiecznych i pasażerów. Te aspekty działalności ludzkiej na morzu powinny być poddawane specjalnym ograniczeniom, które tworzone są z myślą o zapobieganiu występowania zjawisk ekstremalnych lub zabezpieczaniu rozprzestrzeniania się skutków takiej działalności.
Rozwój współczesnej techniki, możliwość gromadzenia i przekazywania informacji
z wykorzystaniem sieci komputerowych, systemów łączności bezprzewodowej oraz możliwość określania pozycji statku w sposób ciągły z satelitarnych systemów nawigacyjnych – daje możliwość odciążenia kapitana z konieczności kompletowania na statku odpowiednich informacji. Okazało się, że większość tych danych można zgromadzić zanim statek opuści port i bez udziału statku przekazywać dane wszystkim ośrodkom koordynującym akcje ratownicze wzdłuż trasy jego rejsu, a także portom do których statek zmierza.
Właśnie takie cele do osiągnięcia zostały wzięte pod uwagę przy tworzeniu Dyrektywy 2002/59/WE. Dyrektywa ta wdrożona również w legislacji polskiej stała się motywem do tworzenia Europejskiej sieci do przesyłania informacji o statkach poruszających się po wodach Wspólnoty Europejskiej – SafeSeaNet.
System Wymiany Informacji Bezpieczeństwa Żeglugi (SWIBŻ)- składowa Narodowego Systemu SafeSeaNet
System ten został utworzony przez Urząd Morski w Gdyni w związku z implementacją techniczna postanowień wynikających z Dyrektywy 2002/59/WE Parlamentu Europejskiego
i Rady z dnia 27 czerwca 2002 r.
SWIBŻ, jako system, dzieli się na dwa segmenty, aplikacje – mapową oraz internetową.
SWIBŻ jako centralna aplikacja Narodowego SafeSeaNet pełni następujące funkcje:
- Prezentowanie wszelkich danych z dostępnych źródeł (VTS, VTMS, VMS, radary, AIS-PL, hydro- meteo, RDF, bazy danych statków, itp.);
- Prezentowanie danych z zewnętrznych systemów AIS (HELCOM, EMSA, NATO);
- Wymiana i prezentacja danych z SSN;
- Ocena ryzyka;
- Wspomaganie zarządzania kryzysowego i wymiany informacji.
- Prezentowanie danych z systemu kontrolno-informacyjnego dla portów polskich – National Single Window (NSW) .
Użytkownicy SSN mają możliwość zapytania o konkretną jednostkę/podróż za pomocą Narodowego SSN. Zapytanie skierowane jest do Centralnego systemu, który następnie kieruje je do odpowiedniego Narodowego SSN, a gdy uzyska odpowiedź w postaci komunikatu
z danymi, przekazuje je do użytkownika który wystosował zapytanie. Cała procedura trwa poniżej 2 minut.
Schemat wymiany informacji pomiędzy różnymi Narodowymi Systemami SSN Krajów Członkowskich został przedstawiony na poniższym rysunku.

Do informacji przesyłanych za pomocą systemu SSN należą między innymi:
- Dane jednostki;
- Dane dotyczące podróży;
- Notyfikacje HAZMAT – dane dotyczące ładunków niebezpiecznych;
- Notyfikacje WASTE – Dane o odpadach;
- Notyfikacje SECURITY – Dane o ochronie statków;
- Notyfikacje BUNKERS – Dane o zasobach paliwa na burcie statku;
- Dane dotyczące incydentów morskich;
- Raporty MRS (obowiązkowy system raportowania).

8. Radary brzegowe dalekiego zasięgu, radary portowe i radary VTS
Podstawowe źródło pozyskiwania informacji nawigacyjnych to brzegowe stacje radarowe. Dodatkowe wyposażenie systemu pozwalające na obserwację wzrokową jest zestaw kamer wizyjnych CCTV (Closed-circuit television), który umożliwia przekazywanie obrazu w celu zwiększenia bezpiecznej żeglugi. Funkcje zbliżenia obrazu oraz podczerwieni pozwalają użytkownikowi prowadzić obserwację wzrokową zarówno w ciągu dnia, jak i nocy. Za pomocą kamer można prowadzić obserwację jednostek pływających, a także zanieczyszczeń na powierzchni wody.
Głównym źródłem informacji obrazowej dostarczanej do centrum VTS jest sieć radarowych stacji brzegowych. System identyfikacji i śledzenia VTS Zatoka Gdańska działa z wykorzystaniem [6]:
- sześciu radarów brzegowych, które umieszczone są w następujących lokalizacjach:
-Władysławowo,
-Latarnia Morska Hel,
-Wieża Kapitanatu Portu Gdynia,
-Wieża Kapitanatu Portu Gdańsk- Port Północny,
-Wieża radarowa Górki Zachodnie,
-Latarnia Morska Krynica Morska.
- systemu automatycznej identyfikacji statków (AIS) w oparciu o stację bazową na latarni morskiej Hel;
- radionamierników RDF (Radio Direction Finder) na latarniach Hel i Krynica Morska;
- kamer wizyjnych CCTV (Closed-circuit television);
- sensorów hydrometeorologicznych;
- systemu obowiązkowych meldunków z wykorzystaniem VHF;
- radar brzegowy dalekiego zasięgu umieszczony na platformie wydobywającej ropę i gaz – Baltic Beta (wchodzi w skład Krajowego Systemu Bezpieczeństwa Morskiego (KSBM), który może być wykorzystany przez System VTS).
Obszar objęty działaniem systemu VTS Zatoka Gdańska przedstawiony został na poniższym rysunku.
Obejmuje on strefę wyznaczoną przez linie graniczne obowiązkowego systemu zgłaszania statków ‘GDANREP’, określone współrzędnymi geograficznymi (WWW-1):
φ = 54°45,00’N – λ = 018°32,56’E
φ = 54°45,00’N – λ = 019°06,10’E
φ = 54°36,20’N – λ = 019°24,20’E
φ = 54°27,49’N – λ = 019°38,30’E
Podsystem radarowy jest podstawą całego systemu VTS i częścią systemu identyfikacji i śledzenia ruchu statków na Zatoce Gdańskiej. Jednym z głównych zadań podsystemu jest dostarczanie w czasie rzeczywistym informacji o ruchu statków na podstawie danych z radarów brzegowych z określonych stacji pomiarowych.
Radary pracują w sposób ciągły, swoim zasięgiem pokrywają cały obszar odpowiedzialności Systemu VTS Zatoka Gdańska, w znacznej części dany obszar jest obejmowany przez dwa, a nawet trzy radary. Ma to duże znaczenie w razie awarii któregoś z nich.
Sygnał wizyjny z brzegowych stacji radarowych przekazywany jest do centrum VTS za pomocą rozległej sieci komputerowej typu WAN (Wide Area Network). Jest ona podzielona na podsieci, które zlokalizowane są w (WWW-1) Kapitanacie Portu Gdynia, Kapitanacie Portu Gdańsk Port Północny, wieży radarowej w Górkach Zachodnich, latarni morskiej w Krynicy Morskiej, latarni morskiej na Helu. Komunikują się one miedzy sobą za pomocą łącz radiowych i światłowodowych.
Gdynia — Gdańsk Port Północny > łącze światłowodowe
Gdynia — Hel > radiolinia
Gdańsk — Krynica Morska > radiolinia
Gdańsk — Górki Zachodnie > radiolinia.

System VTS Zatoka Gdańska korzysta z systemu zobrazowania ruchu statków i współpracującej z nim bazy danych statków zawijających do portów Zatoki Gdańskiej.
Rozwiązania techniczne, które pozwalają na przesyłanie drogą elektroniczną dokumentów wymaganych przed wejściem statku do portu, znacznie zmniejszyły ilość informacji podawanych przez statki wchodzące w obszar VTS Zatoka Gdańska.
Korespondencja radiowa statek – służba VTS ograniczają się do niezbędnego minimum [4]:
- identyfikacja statku;
- ostatni port zawinięcia;
- aktualne zanurzenie statku;
- obecność na burcie ładunków niebezpiecznych i zanieczyszczających;
- całkowita liczba osób na burcie;
- Stopień ochrony statku (o ile podlega wymogom ISPS w tym zakresie);
- ETA do pozycji pilotowej portu przeznaczenia.
WNIOSKI
Radar jest jednym z podstawowych urządzeń stosowanych w nawigacji lądowej i morskiej; po jego zadziałaniu możliwa jest wizualizacja otaczającej przestrzeni. Sygnał wysyłany z radaru wraca do urządzenia po odbiciu od obiektu. Po przetworzeniu tworzy obraz radarowy dla określonej przestrzeni. Na dokładność obrazu wpływają liczne zniekształcenia, charakterystyczne dla specyfiki prowadzenia obserwacji radarowych i powodujące, że obraz odbiega od rzeczywistego. Współczesna technologia pozwoliła zredukować błędy, które utrudniają obserwacje radarowe, co pozwoliło znaleźć nowe koncepcje w zakresie zastosowania radaru do nawigacji, zwłaszcza do ustalania pozycji statków.
Jako podstawowy element systemu nadzorowania i regulacji ruchu statków (VTS) traktuje się stacje radarowe, poprzez które monitoruje się i kieruje ruchem jednostek pływających na akwenach ograniczonych m.in. na akwenach portowych. Otrzymanie informacji o pozycjach jednostek pływających na takim akwenie pozwala poprawić bezpieczeństwo nawigacyjne, a konkretniej unikania zderzeń.
Stosowanie dotychczasowych systemów VTS potwierdza poprawę poziomu bezpieczeństwa, jak również uzyskanie wzrostu płynności ruchu statków, a co za tym idzie – znaczne korzyści finansowe wynikające z szybkiego obsługiwania jednostek pływających przez kapitanat portu. Administracje lokalne odpowiedzialne za ochronę środowiska morskiego kładą duży nacisk na wprowadzanie takich systemów VTS. Znacznie zmniejsza to zagrożenie środowiska wynikające przykładowo z wypadku morskiego spowodowanego intensywnym ruchem oraz znacznym wzrostem wielkości statków.
Podsumowując Służba VTS Zatoka Gdańska odgrywa kluczową rolę w bezpieczeństwie żeglugi, a nie odbyłoby się to bez pomocy sieci radarowych stacji brzegowych, kamer wizyjnych, radionamierników, radarów dalekiego zasięgu, portowych, czy radarów VTS.
9. System rozpowszechniania ostrzeżeń nawigacyjnych VTS i BHMW
9.1 Serwisy Służby VTS
Serwis informacyjny
Serwis informacyjny jest usługą świadczoną przez służbę VTS w celu zapewnienia, by istotna informacja była dostępna na czas dla użytkowników systemu i posłużyła do wspomagania procesu decyzyjnego na burcie statku w zakresie bezpieczeństwa żeglugi w obszarze VTS.
Informacja udostępniana w serwisie informacyjnym może dotyczyć:
a) pozycji, zamiarów, manewrów i identyfikacji statków;
b) obszarów o większym ruchu statków;
c) ruchu statków, które stwarzają zagrożenie lub są ograniczone swoim zanurzeniem;
d) zalecanej trasy przejścia, status akwenów okresowo zamykanych dla żeglugi i rybołówstwa;
e) miejsc i akwenów na których prowadzone są prace mające wpływ na bezpieczeństwo nawigacji;
f) zamknięcia akwenów i portów;
g) bezpieczeństwa i ochrony żeglugi;
h) ostrzeżeń nawigacyjnych;
i) stanu oznakowania nawigacyjnego i radionawigacyjnego;
j) prognoz, warunków rzeczywistych i ostrzeżeń hydrometeorologicznych;
k) warunków lodowych;
l) wstrzymania usług pilotażu lub usług VTS;
m) zmian i uzupełnień w usługach świadczonych przez VTS.
Serwis informacyjny świadczony jest przez służbę VTS na kanale roboczym VTS (kanał 71 VHF) lub na kanale zapasowym VTS (kanał 66 VHF), po zapowiedzi na kanale roboczym.
Godziny transmisji komunikatów stałego serwisu informacyjnego – ostrzeżeń nawigacyjnych i prognozy pogody dostępne są w publikacjach nautycznych (oraz podane są poniżej). Pozostałe informacje serwisu informacyjnego przekazywane są przez służbę VTS w zależności od sytuacji nawigacyjnej w obszarze VTS oraz na żądanie użytkowników.
Transmisje informacji są poprzedzane zapowiedzią na kanale 16 VHF z podaniem kanału roboczego na którym będą przekazane. Wszystkie statki nawigujące w obszarze VTS powinny słuchać zapowiedzianych transmisji.
Godziny transmisji komunikatów stałego serwisu informacyjnego:
Ostrzeżenia nawigacyjne, komunikaty meteorologiczne, prognozy pogody:
Zapowiedź – VHF kanał 16, 71.
Transmisja – VHF kanał 66:
– o godz. 0005, 0705, 1305, 1905 LT (czasu lokalnego); po polsku,
– na życzenie użytkowników.
Serwis asysty nawigacyjnej
Serwis asysty nawigacyjnej jest usługą doradztwa świadczoną przez służbę VTS w celu wspomagania procesu decyzyjnego na burcie statku w zakresie bezpieczeństwa żeglugi w obszarze VTS i kontroli efektów wykonania podjętych decyzji.
Asysta nawigacyjna udzielana jest za pośrednictwem łączności VHF na podstawie informacji radarowej, w następujących sytuacjach:
a) gdy służba VTS uzna ją za konieczną dla zapewnienia bezpieczeństwa żeglugi i ochrony środowiska w obszarze VTS;
b) na żądanie kapitana statku w przypadku szczególnie złych warunków pogodowych, ograniczonej widzialności, zmian w usługach pilotażu lub w niebezpieczeństwie grożącym statkowi.
Asysta nawigacyjna będzie udzielana statkom tylko wtedy, jeśli statek został jednoznacznie zidentyfikowany na ekranie radarowym i ciągłość jego śledzenia jest zachowana w trakcie całego procesu asysty nawigacyjnej.
Zapewnienie asysty nawigacyjnej dla statku nie zwalnia kapitana od osobistej odpowiedzialności za prowadzenie bezpiecznej nawigacji tego statku i nie może być traktowane jako „zdalny pilotaż”.
Początek i koniec asysty nawigacyjnej powinien być wyraźnie ogłoszony na kanale łączności na którym jest udzielana, przez statek żądający asysty lub służbę VTS i potwierdzony przez drugą stronę.
Informacja nawigacyjna udzielana podczas asysty nawigacyjnej przez służbę VTS może dotyczyć:
a) kursu i prędkości statku nad dnem;
b) pozycji w stosunku do linii rozgraniczającej lub strefy rozgraniczającej systemu rozgraniczenia ruchu, w stosunku do zalecanej trasy lub stałych punktów nawigacyjnych;
c) pozycji, zamiarów i identyfikacji innych statków w pobliżu;
d) ostrzeżeń dla pojedynczych statków odnośnie ich niebezpiecznych parametrów ruchu.
Kapitan każdego statku po odebraniu informacji lub ostrzeżenia dotyczącego parametrów ruchu statku, powinien niezwłocznie porównać kurs, prędkość i pozycję swojego statku z odebranymi w informacji lub ostrzeżeniu.
Asysta nawigacyjna udzielana przez służbę VTS jest bezpłatna.
Serwis organizacji ruchu (tylko statki awizowane)
Serwis organizacji ruchu jest usługą świadczoną przez służbę VTS w celu zapobiegania sytuacjom nadmiernego zbliżenia między statkami oraz w celu zapewnienia bezpiecznego i efektywnego ruchu statków w obszarze VTS.
Przekazywanie jakichkolwiek instrukcji dotyczących organizacji ruchu statków awizowanych w obszarze VTS dozwolone jest jedynie na kanale roboczym VTS (kanał 71 VHF), za pośrednictwem służby VTS.
Kapitan każdego statku w obszarze VTS zobowiązany jest wykonać instrukcje organizacji ruchu dla jego statku otrzymane od służby VTS. Instrukcje będą wskazywały wynik działań, jakie statek powinien podjąć, pozostawiając decyzję co do sposobu ich wykonania kapitanowi statku. Instrukcje mogą zawierać polecenia ograniczenia prędkości statku w celu osiągnięcia wyznaczonych punktów drogi na określony czas, mogą dotyczyć ograniczeń w wyprzedzaniu określonych statków oraz zezwoleń na włączenie się do ruchu lub przecięcia toru kierunkowego.
Serwis organizacji ruchu opiera się na wcześniejszym planowaniu ruchu statków awizowanych, w oparciu o:
a) obowiązkowy system meldunkowy statków na liniach i w punktach zgłoszeniowych;
b) obowiązkowe zgłoszenie przez statek ETA oraz meldunku wyjścia z portu;
c) przydział trasy ruchu w obszarze VTS którym statek powinien podążać;
d) przydział miejsca kotwiczenia lub postoju;
e) system zezwoleń na włączenie się do ruchu.
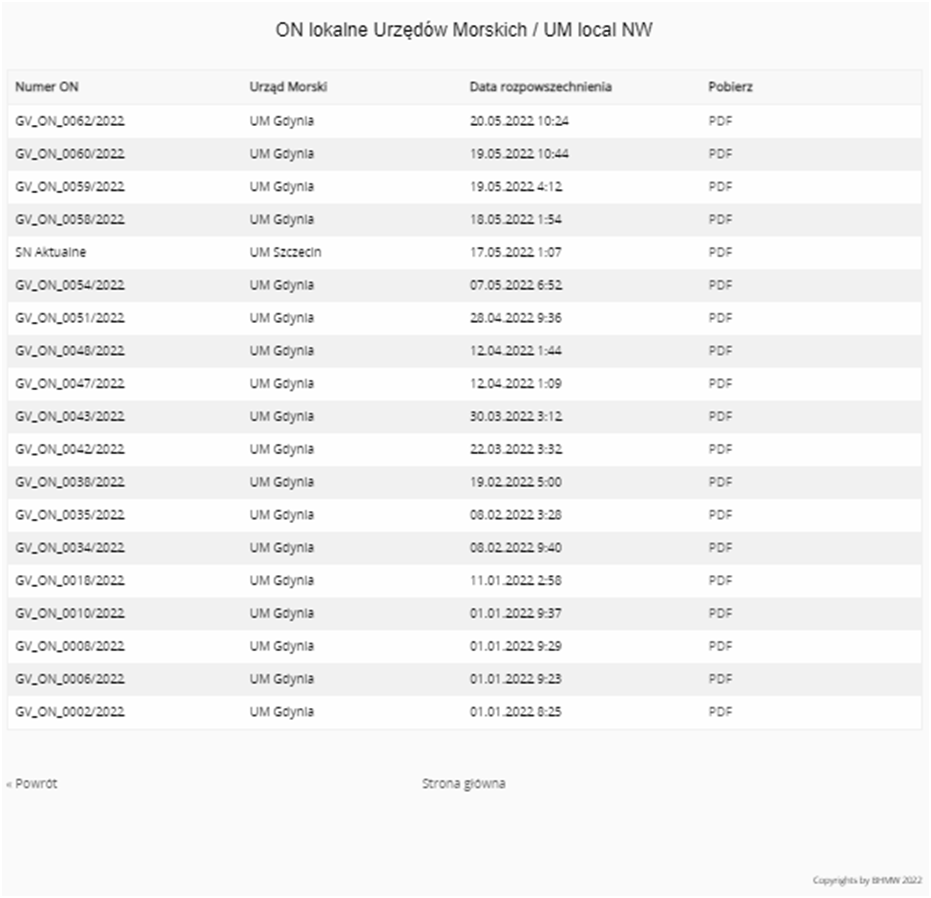
9.2. Ostrzeżenia Nawigacyjne